


コグニティブ・マップAIシステムの心の設計図

コグニティブ・マップAIシステムの心の設計図
 認知マップ.png
認知マップ.png
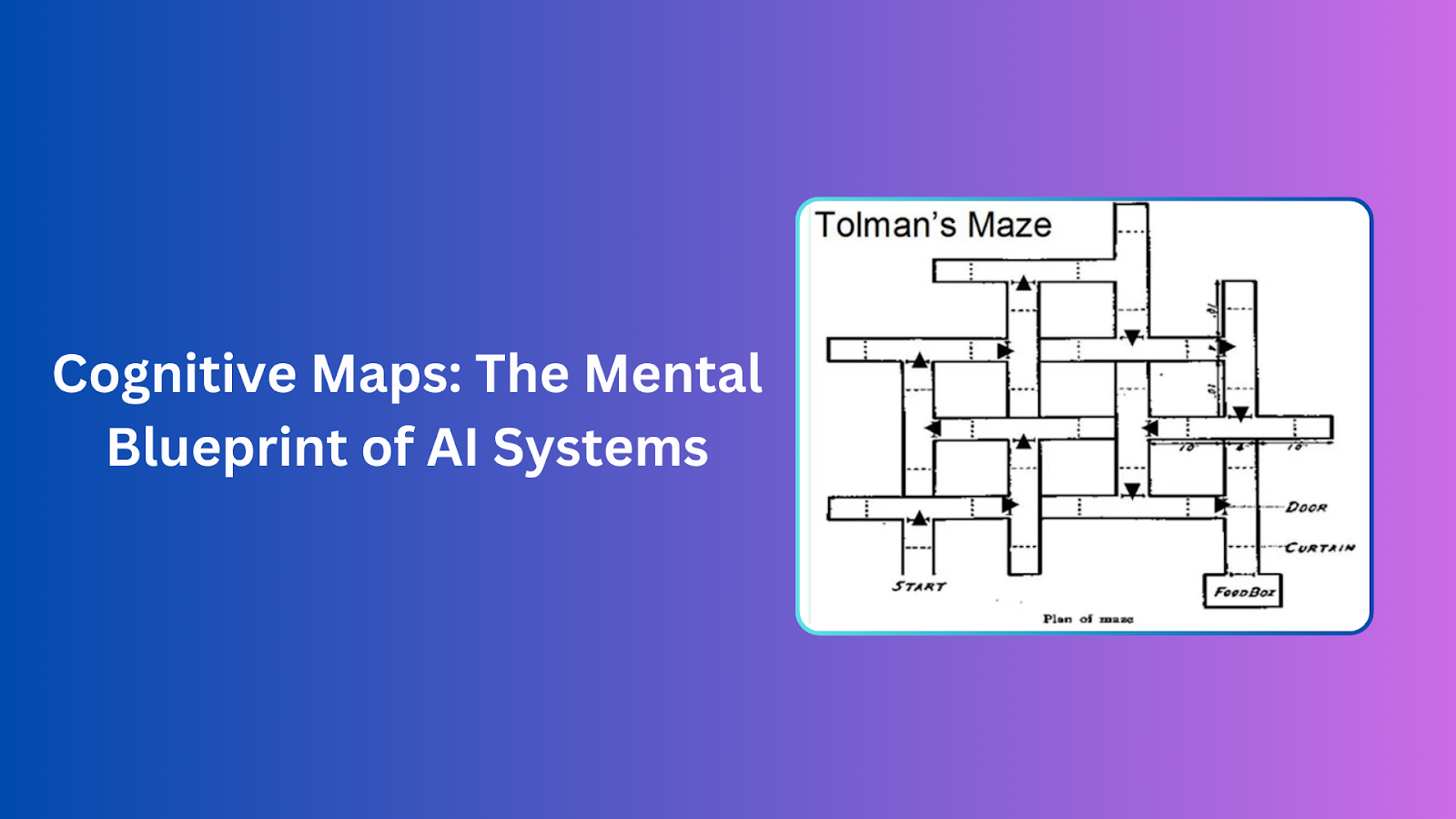
認知マップ
人間や動物がどのようにして複雑な環境をナビゲートしているのか、不思議に思ったことはないだろうか?あるいは、どのようにして人工知能(AI)システムがこの空間認識を再現できるのだろうか?認知マップがその鍵を握っている。この言葉は、心理学者[エドワード・トルマン](https://home.csulb.edu/~cwallis/382/readings/482/tolman.%20cognitive_maps_in_rats_and_men.1948.html)が1948年にラットを使って実験したときに紹介された。トルマンは、ネズミがすぐに報酬が得られなくても、メンタルマップを形成することで迷路を効率的に移動できることを観察した。この実験から、彼は認知的写像、つまり自分の物理的な周囲の状況を心で表現するという考えを発展させた。
今日、コグニティブ・マップは心理学を超えてAIにまで広がっており、システムが学習し、予測し、世界との相互作用を最適化するのに役立っている。この概念は、機械学習を進歩させ、AIにおける空間的推論を改善する上で重要である。
では、コグニティブ・マップについて、その仕組み、重要性、利点、課題などを詳しく理解しよう。
コグニティブ・マップとは何か?
コグニティブ・マップとは、物理的な環境を心で表現したもので、周囲の環境を理解し、ナビゲートするのに役立ちます。認知マップには、物体、場所、経路間の空間的関係が含まれており、Googleマップのような外部ツールに頼ることなく、道順を思い出したり、経路を計画したり、重要な場所を認識したりするのに役立ちます。認知マップは動的であり、環境に関する新しい情報が得られると適応する。
AIでは、認知マップは環境や知識を表現する構造化されたモデルである。特にロボット工学や自律型技術におけるシステムでは、人間がメンタルマップを使うのと同じように、実世界の設定をシミュレートし、結果を予測し、空間的関係の理解に基づいて意思決定を行うことができる。
コグニティブマップはどのように機能するのか?
認知マップは、感覚入力、学習、記憶の融合によって構築される。 人間と同じように、AIシステムも周囲の環境を認識し、経験から学び、世界の理解を更新する必要がある。AIにおける認知マップの仕組みを理解するために、いくつかの重要な側面に分けて考えてみよう:
1.知覚とデータ収集
2.地図の作成
3.マップの学習と更新
4.意思決定のためのマップの使用
5.自己ローカライゼーションと同時ローカライゼーション・マッピング(SLAM)
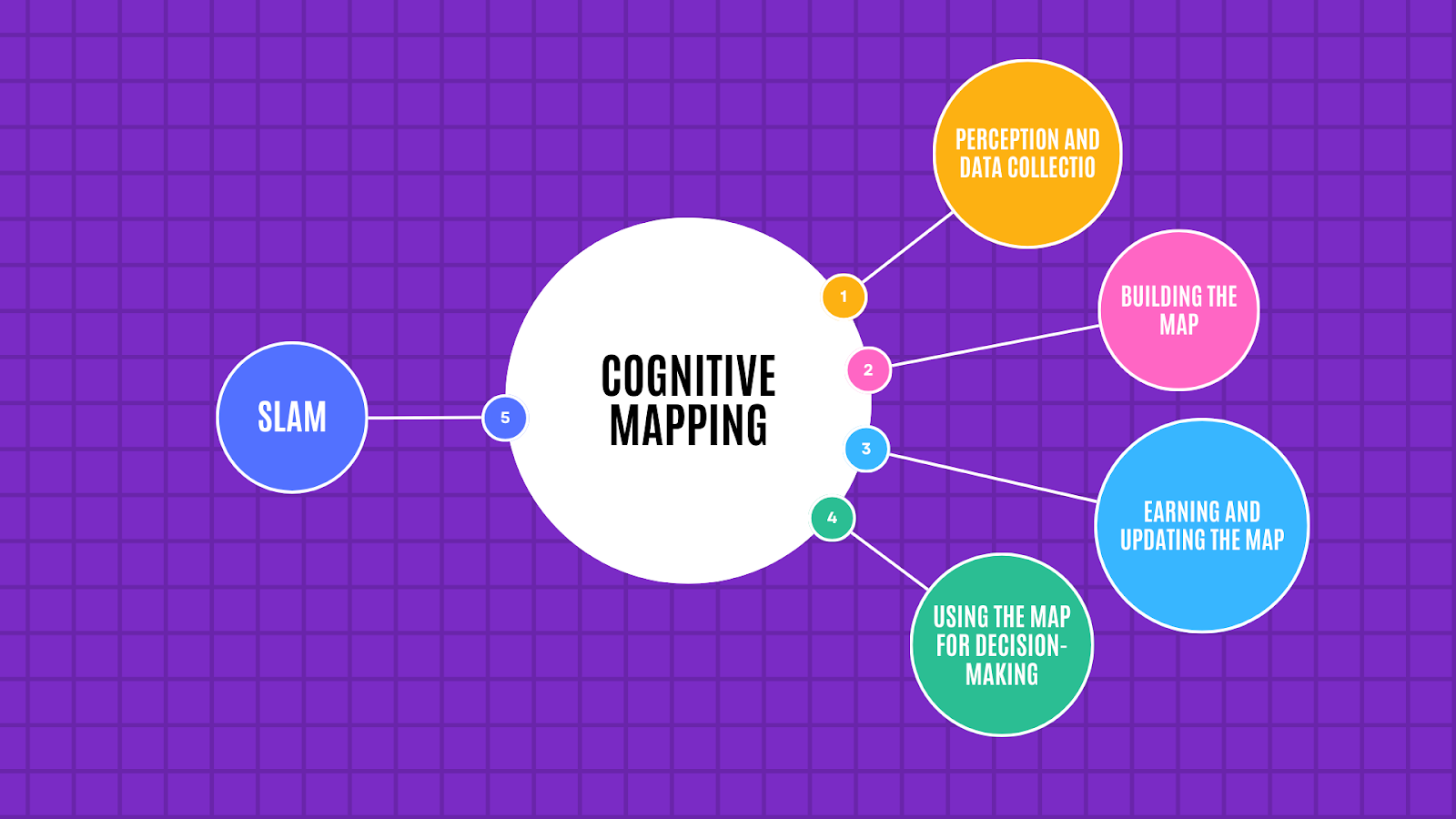 図-コグニティブ・マッピングの中核的側面.png
図-コグニティブ・マッピングの中核的側面.png
図コグニティブ・マッピングの核となる側面
1.知覚とデータ収集
AIにおける認知マップは、知覚-環境からデータを収集することから始まる。AIシステムは情報を収集するために、カメラ、LiDAR、GPSなどのさまざまなセンサーに依存する。例えば、自律走行車では、センサーが近くの物体、道路標識、歩行者に関する情報を継続的に収集する。
2.地図の構築
データが収集されると、AIシステムはそれを処理して環境の表現を構築する。認知マップは、AIではグラフベースのモデルまたはグリッドベースのマップとして表現される。
グラフベース・モデル:**](https://zilliz.com/learn/what-is-knowledge-graph) ノードはオブジェクトやランドマークを表し、エッジはそれらの関係を示す。このモデルは、最短経路の決定や次の行動の予測などの意思決定プロセスにおいて特に有用である。
グリッドベースマップ:***環境はグリッドに分割され、各セルは自由空間または障害空間を表す。このアプローチは、利用可能な経路と障害物を特定するために、ロボットナビゲーションで一般的に使用されている。例えば、ロボット掃除機は、掃除中に家具や壁をマッピングするためにグリッドを使用します。
3.マップの学習と更新
AIエージェントは常に環境と相互作用し、認知マップを更新するために新しい情報を収集する。新たな障害物が出現する可能性のあるダイナミックな環境(例えば、工事現場)では、システムはリアルタイムでマップを適応させなければならない。
例えば、商品を配送する倉庫ロボットが、新しく積み上げられた箱の山がいつものルートを塞いでいるのに遭遇するかもしれない。これに対し、ロボットは内部マップを更新し、障害物を迂回する新しいルートを再計算する。
4.意思決定のためのマップの使用
認知マップは経路探索と意思決定の基盤である。マップに基づいて、AIシステムはさまざまな経路や行動をシミュレートし、最適な経路を見つける。例えば、ロボットは認知マップを使用して、現在位置から目標の目的地までの最適な経路を計画する。強化学習では、エージェントはマップを使用して、時間の経過とともに報酬が最大になるような意思決定を行う。
5.同時定位マッピング(SLAM)
コグニティブ・マッピングの核となる概念はSLAMであり、AIシステムはその空間内の位置を決定しながら同時に周囲をマッピングする。SLAMは、AIエージェントが環境に関する予備知識を持たない場合に重要である。例えば、ロボットが新しい部屋に入るとき、SLAMを使用して空間をマッピングすると同時に、自身の位置を追跡する。
比較コグニティブマップ vs. シンボリックAI vs. コンセプトマップ
一見関連しているように見えるが、コグニティブマップ、シンボリックAI、コンセプトマップは、知識をどのように表現し、AIシステムに推論と学習を可能にするかという点で大きく異なる。
| :-------------:| :----------------------------------------------------------------------------------------------------------------------------------------------:| :-----------------------------------------------------------------------------------------------------:| :--------------------------------------------------------------------------------------------------------------:| | アスペクト** | 認知マップ | シンボリックAI | コンセプト・マップ | | 焦点|空間表現とナビゲーション|記号とルールを用いた明示的知識に焦点を当てる。 | 知識表現|相互接続された概念のネットワークとして知識を表現する。 | 表現方法|グラフベースまたはグリッドベースのマップ|記号、論理、ルール(例:"IF-THEN "ステートメント)|ノードは概念、リンクは関係を表す。 | 長所|-効率的な経路探索とプランニングを可能にする-空間的推論と文脈認識を促進する-ダイナミックな環境に適応できる|-説明可能で透明な推論-抽象的で複雑な概念を扱える|-複雑な情報の視覚化と整理を助ける-知識の発見と理解を促進する|||長所|-効率的な経路探索とプランニングを可能にする-空間的推論と文脈認識を促進する||長所|-説明可能で透明な推論-抽象的で複雑な概念を扱える | 大規模な環境では計算が複雑になる可能性があり、正確なマップを構築するためには膨大なデータが必要になる可能性がある。 | AIアプリケーション|ロボット工学、自律走行車、ゲームAI、NLPにおける空間理解|ルールベースシステム、定理証明、知識ベースの質問応答|意味解析、教育技術、概念学習|。
認知マップの利点と課題
さて、AIにおけるコグニティブ・マップの内部構造について説明してきたが、その利点と開発および実装における課題を理解することが重要である。
利点
リアルタイム適応:コグニティブ・マップは、AIシステムが新しく変化する環境に適応することを可能にする。例えば、自律型ドローンは飛行中に予期せぬ障害物を避けるためにマップを更新することができる。
スケーラビリティ:**これらのマップは、大規模で複雑な環境を表現するために拡張することができます。例えば自動運転車は、都市全体の大規模マップに依存している。
空間理解の強化:**コグニティブマップは、AIが空間的関係や文脈情報を理解することを可能にし、ナビゲーション、画像認識、言語理解といったタスクのパフォーマンスを向上させる。
効率的なプランニング:**コグニティブ・マップを使用することで、AIはより効率的に行動を計画し、複雑な環境における意思決定プロセスに不可欠な結果を予測することができる。
課題
詳細なコグニティブ・マップの作成と更新には、特にリアルタイムで大きな計算リソースが必要です。
ダイナミックな環境における不確実性:** 急激に変化する環境は不確実性をもたらします。例えば、市街地走行では、自動運転車は進路に進入してくる歩行者や車両を考慮して常にマップを更新する必要があります。
センサーの信頼性:** 認知マップは信頼できるセンサーデータに依存します。センサーの誤作動は不正確なマップにつながり、その結果、意思決定が不十分になる可能性があります。
AIにおける認知マップの応用
コグニティブマップは、自動運転車が道路をナビゲートし、交通パターンを理解し、最適なルートを計画することを可能にする。
コグニティブ・マップを搭載したロボットは、屋内環境をナビゲートし、配送や清掃などのタスクを実行し、人間との対話をより効果的に行うことができる。
自然言語処理:コグニティブ・マップは、AIシステムの空間言語と文脈の理解を向上させ、場所や方向に関する質問に答えることを可能にする。
レコメンダーシステム:**コグニティブマップは、ユーザーの好みや位置情報を取り入れることで、レコメンダーシステムを強化し、より適切でパーソナライズされた提案を提供することができる。
よくある質問
1.**認知マップとメンタルマップの違いは何ですか?
コグニティブマップはナビゲーションのために使用される空間情報の心的表現であり、マインドマップはアイデアや概念を階層的に整理するものです。この2つの用語は似ているように見えますが、その目的は全く異なります。
2.**コグニティブマップにおけるSLAMの役割とは?
SLAM(Simultaneous Localization and Mapping)は、AIシステムが位置を追跡しながら環境をマッピングすることを可能にする。事前の地図が利用できないダイナミックな環境では非常に重要です。
3.**コグニティブ・マップの恩恵を受ける主な産業は?
自律輸送、ロボット工学、ゲームなどの産業は、リアルタイムの空間認識を必要とするため、コグニティブマップから大きな恩恵を受ける。
4.**AIにおけるコグニティブマップの未来は?
コグニティブマップは、AIにおいてますます重要な役割を果たすと予想され、機械が周囲の世界をより良く理解し、対話することを可能にする。今後の研究は、より高度でスケーラブルなコグニティブマップ技術を開発し、自然言語処理やコンピュータビジョンのようなAI機能と統合することに焦点が当てられるかもしれない。
5.**AIにおけるコグニティブ・マッピングに必要な計算量とは?
コグニティブ・マッピング、特に自動運転車のようなリアルタイム・システムでは、継続的な更新と意思決定を管理するために、大きな処理能力、堅牢なセンサー、効率的なアルゴリズムが必要となる。
続きを読む
Milvusドキュメント - Milvusの公式ドキュメント](https://milvus.io/docs/quickstart.md)
大規模言語モデルと検索](https://zilliz.com/learn/large-language-models-and-search)
LLM-Eval: A Streamlined Approach to Evalating LLM Conversations](https://zilliz.com/learn/streamlined-approach-to-evaluating-llm-conversations)
MilvusでAIアプリを作る: チュートリアルとノートブック](https://zilliz.com/learn/milvus-notebooks)
あなたのGenAIアプリのためのトップパフォーマンスAIモデル|Zilliz](https://zilliz.com/ai-models)