


自動運転における真のボトルネック — そしてAIインフラがそれらを解決する方法
10年にわたる開発と数千億ドル規模の投資を経て、自動運転は新たな時代に入りました。業界は、テスラのFSD v13.2.8のロールアウトとWaymoの完全自動運転ライドヘイリングサービスの拡大を象徴として、予測フェーズから検証フェーズへと移行しています。
しかし、実世界での展開が始まるなかで、重大なボトルネックが浮上しています。データインフラがアルゴリズムの進歩に追いついていないのです。 モデルの能力が高まる一方で、走行データをマイニング、処理、管理するために使われるシステムは過去に取り残されたままです。その結果、自動運転のスケーリングに大きな摩擦が生じています。
進むべき道は、より多くのデータを収集することではありません。すでに持っているデータから、より多くの意味を抽出することです。これには、人間中心のパイプラインからAIネイティブなデータインフラへの転換が求められます。硬直的な構造化データではなく、セマンティックな理解に最適化されたベクトルデータベースを基盤とするインフラです。
このブログでは、従来のデータ処理がなぜ破綻しつつあるのか、この危機が完全自動運転への道のりをどのように遅らせているのか、そしてBoschのようなリーダー企業がすでに活用している新世代のAI搭載ツールが、自動運転の未来にとって何を意味するのかを探ります。
自動運転データマイニングにおける上位3つの課題
不可能なスケールの問題
RANDの推定によれば、自動運転車が人間のドライバーよりわずか20%安全であることを証明するには、110億マイルの走行が必要です。これは、1人の人間にとって100万年分の運転に相当します。時速25マイルで休みなく走る100台のAV専用フリートでさえ、その目標に到達するには5世紀以上かかります。これは自動車の140年の歴史全体よりも長い時間です。
そして、データの問題があります。IBMによると、1台のテストカーは1時間あたり1TBのデータを生成します。これを、1日8時間稼働する控えめな100台規模のフリートに掛け合わせると、データの海に溺れることになります。従来の方法で処理するには、100万人を超える人間のアノテーターが必要になります。
つまり本当の課題は、単により多くのデータを集めることではありません。すでに存在する海の中から適切なデータを見つけ出すことなのです。
手動ラベリングの危機:人間によるアノテーションが失敗している理由
Mobileyeを例に取りましょう。200PBのデータを管理し、2,500人以上のアノテーター、500,000個のCPUコアを擁し、毎月5,000万件のデータセットを処理しています。それでもなお、対応しきれずにいます。
なぜでしょうか?ロングテールのエッジケース、つまり稀ではあるものの重要なケースでは、フレームごとの動画分析と深い時空間的理解が必要だからです。動画アノテーションは静止画像より3〜5倍高コストで、各シーンに2〜5分かかり、高いエラー率も残ります。
さらに悪いことに、スケールが大きくなるほど品質は低下します。自動運転データには、カメラ、LiDAR、レーダー、GPSといった複雑なセンサーフュージョンが含まれ、これらは完全に整合していなければなりません。手動ラベリングはしばしば的を外し、20〜30%の手戻り率と、修正にかかる数百万ドル規模のコストにつながります。
そして、人間によるアノテーションはセマンティックな深さにおいて限界にぶつかります。夕暮れ時に赤いトラックが黄色信号で左折し、その横で高齢の女性が犬を散歩させている――このようなシーンにおける意図、文脈、行動を理解することは、従来のラベリングシステムのはるか先にあります。
根本的なパラダイムの失敗
これは単なるスケーリングの問題ではありません。自動運転データの複雑さと、それを扱うために私たちが使っている時代遅れのツールとの間にある、根本的なミスマッチです。
従来のデータマイニングは、構造化され予測可能な入力を前提に構築されていました。しかしAVシステムは、時空間的理解、マルチモーダルなセンサーフュージョン、文脈推論を必要とする、複雑で雑然とした実世界環境で動作します。これは、手動アノテーションやレガシーなパイプラインがスケールして扱える範囲をはるかに超えています。
必要なのは、古いアプローチの改良版ではありません。膨大で高次元なデータから意味を抽出する方法そのものを、完全に考え直すことです。
ベクトルデータベース:コーナーケースマイニングの新たなパラダイム
AIによる変革
マルチモーダル大規模モデルとベクトルデータベースの台頭は、自動運転データのマイニング方法を再定義しています。人間がすべてのフレームにラベル付けすることに頼る代わりに、AIモデルは今や生データから直接意味的な意味を抽出します — オブジェクトだけでなく、関係性や文脈も捉えます。
この変化はCLIPのようなモデルから始まり、GPT-4oやGeminiのような次世代マルチモーダルモデルによって加速しました。これらはもはや大規模なファインチューニングを必要としません。これらのモデルは、生動画から希少なパターンを特定し、きめ細かな意味情報を抽出できます — それは人間のアノテーターが見落としたり誤解したりしがちな洞察です。
次に、これらのAIモデルは、動画クリップ、画像フレーム、オブジェクトを、ラベル、テキスト記述、そして意味的関係を保持する高次元埋め込みへと変換します。これらすべての埋め込みはその後、Milvusのようなベクトルデータベースに保存され、単なる見た目ではなく文脈を理解する高度な類似検索に利用されます。
ワークフローは根本的に変化しました。
従来のアプローチ: 生センサーデータ → 手動の特徴量エンジニアリング → ルールベース処理 → 限定的な意味タグ
AI活用アプローチ: 生センサーデータ → マルチモーダルAI処理 → 豊富な意味埋め込み → ベクトルデータベースによるインテリジェントな類似検索
従来のデータベースが不十分な理由
従来のデータベースは、構造化メタデータと事前定義されたラベルに依存しています。たとえば、データセット内に赤いトラックが何台登場するかを教えてくれますが、文脈や意図を理解することはできません。
ベクトルデータベースは、新たな種類の検索と分析を可能にします。
テキストから画像へ: 「低照度で歩行者が横断するシナリオを見つける」
画像から画像へ: 「これに類似したニアミス事例を見つける」
マルチモーダル: 視覚、テキスト、構造化データを単一のクエリで組み合わせる
Zilliz Cloudのような最新のエンタープライズ向けソリューションは、マルチベクトル検索をサポートしており、記述、画像、メタデータを横断した同時検索を可能にします。これは単なるアップグレードではありません — データと対話するまったく新しい方法です。
現実世界での検証: Boschの事例
理論上の可能性から実践的な実装への変革は、すでに起こっています。世界最大級の自動車部品サプライヤーの1つであるBoschは、自動運転アプリケーションにおけるベクトルデータベースの有効性を具体的に実証しています。
Milvusベクトルデータベース技術の実装を通じて、Boschは顕著な成果を達成しました。
既存データベースからのシナリオ抽出効率が70〜80%向上
関連シナリオのほぼ瞬時の取得により、時間のかかる手動検索プロセスを排除
インテリジェントな圧縮と量子化により、データストレージコストを年間1,000万ドル削減
既存の関連シナリオを効率的に見つけることで、高コストな新規データ収集の必要性を大幅に削減
これは、業界が必要としている変革そのものを示しています。つまり、力任せのスケーリングではなく、インテリジェントなインフラによって、より低コストでより良い結果を得るということです。
Bosch以外にも、他の主要自動車メーカーが同様の成功を報告しています。ある大手ドイツ自動車メーカーは、エッジケース特定の品質を向上させながら、アノテーション作業負荷を60%削減しました。ある有力な電気自動車メーカーは、ベクトルデータベースを活用した分析により、データ処理パイプラインを数週間から数日に短縮しました。
実世界への導入に向けてベクトル分析を手頃なものにする
ベクトルデータベースは、自動運転における技術的価値をすでに実証しています。しかし、業界がマスマーケットでの普及に向かうにつれ、コストは能力と同じくらい重要になります。自動運転システムは今や、プレミアムモデルだけでなく、一般消費者向けの価格帯の車両に収まる必要があります。つまり、厳しい経済的制約のもとでデータインフラを再考する必要があるということです。
経済的な圧力点
自動運転機能を大規模に展開するには、深刻な財務上の課題が伴います。
高度なコンピューティングハードウェア(例:NVIDIAチップ)は、車両1台あたり数千ドルのコストを追加します
高解像度カメラとLiDARは、ハードウェアBOMコストを増加させます
継続的なデータ保存、送信、処理により、継続的なクラウド費用が発生します
そして、これらすべてを1桁台の利益率の範囲内に収めなければなりません
ある大手EVメーカーは、このことを痛感しました。100PBの走行データを管理するためのベクトルデータベースソリューションを評価した際、予測年間コストは3,000万ドルを超え、プロジェクトは持続不可能なものとなりました。
より賢いアプローチ:階層型データ戦略
すべてのデータが同じ価値を持つわけではありません。自動運転データは、利用ニーズに基づいて自然に分類されます:
ホットデータ: 即時アクセスと最高性能を必要とする最近の走行データ、エッジケース、リアルタイムシナリオ
ウォームデータ: バッチ処理に使用される学習データセットや過去のインサイト — 多少のレイテンシが許容されるもの
コールドデータ: アクセス頻度は低いものの、コスト効率よく保持する必要があるアーカイブ済みシナリオやコンプライアンス記録
重複排除、パターン発見、モデル学習など、ほとんどのAVワークロードはリアルタイム性能を必要としません。大幅なコスト削減と引き換えに、数分から数時間のレイテンシを許容できます。
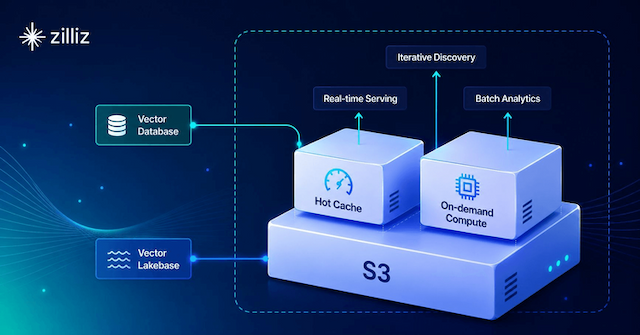
Vector Data Lake:大規模環境でのコスト効率に優れたインテリジェンス
Zillizは、Vector Data Lakeアーキテクチャを通じて、こうした経済的現実に対応しています。このアーキテクチャはコンピューティングとストレージを分離し、性能とコストの両方を最適化します。
これを可能にする3つの主要コンポーネントがあります:
フルスタック統合: オンラインデータとオフラインデータを一貫した形式で統合し、データセットをライフサイクル全体にわたって整理された状態に保ちます
Fusion Compute Architecture: Spark、Ray、Icebergなどのツールとシームレスに連携し、最新のベクトル分析と従来のETLワークフローを組み合わせます
階層型ストレージ管理: ホットデータを高性能メディア上に保持しつつ、コールドデータを低コストのオブジェクトストレージへオフロードします
その結果はどうなるでしょうか?自動運転特有の要求に合わせて設計された、大規模な非構造化データセットを管理するための強力でコスト効率の高いインフラストラクチャを、予算を圧迫することなく手に入れることができます。
自動運転にZillizを選ぶ理由
ベクトルデータベースは、自動運転データインフラストラクチャの重要な構成要素となっています。Zillizが2019年にMilvusをオープンソース化して以来、導入は急増しました。特に2022〜2023年の生成AIブームの時期には顕著でした。しかし、すべてのソリューションが同じように構築されているわけではありません。
自動運転は、ベクトルデータベースを限界まで押し上げます。単にインデックス作成や類似検索を行うだけではありません。進化するスキーマ、高性能、厳しいコスト制約のもとで、膨大なマルチモーダルデータセットを管理することが求められます。
そこでZillizが際立ちます。私たちは基本機能を超え、AVの要求に特化して設計されたエンタープライズグレードのツールを提供します。その方法は次のとおりです:
適応型ラベリングと進化するスキーマ
知覚モデルが進化するにつれて、データ要件も変化します。Zillizでは、動的JSON列とJSONパスインデックスを使用して、ラベルをその場で簡単に更新または拡張できます。実行時に列を追加することもでき、高コストな再インデックス作成や再構築は不要です。
バッチ埋め込み置換によるシームレスなモデル更新
埋め込みモデルを更新しますか?問題ありません。Zillizはエイリアス切り替えをサポートしているため、クエリを中断することなく新しいモデルをデプロイできます。さらに、複数のベクトル列にわたってハイブリッド検索を実行できるため、モデルの比較や改善状況の追跡に最適です。
Bulk Importによる大容量取り込み
ペタバイト規模のAVデータを管理していますか?Zillizのbulk importエンジンは、遅延を最小限に抑えながら高スループットを確保します。過去データを取り込む場合でも、新しい走行データを処理する場合でも、大規模環境でも性能は安定したままです。
コストと性能に最適化されています
自律走行のワークロードでは、非効率は許されません。Zilliz の RabitQ 量子化は、1 ビットエンコーディングでベクトルを圧縮し、高い再現率を維持しながらストレージを桁違いに削減します。Range Search、TopK、Iterator Search、Re-rank などの高度なインデックスオプションにより、ユースケースごとにパフォーマンスを最適化できます。
実世界の統合のために構築
Zilliz’s Vector Data Lake アーキテクチャは、Apache Iceberg や Apache Spark などのツールと統合し、シーン分析、オフラインマイニング、長期的なデータ管理のための統合ワークフローを実現します。同時に、コストも抑制できます。
これは机上の空論ではありません。主要な OEM や AV 企業は、すでに Zilliz を利用してコストを削減し、開発サイクルを短縮し、データから新たな洞察を引き出しています。
結論
自動運転は新たな段階に入りました。そこでは、データインフラがアルゴリズムと同じくらい重要になります。競争の焦点は、単なるスピードから「コンピュート–データ–コスト」の三角形を制することへと移り、大規模 AI モデル、ベクトルデータベース、ベクトルデータレイクが新たな基盤スタックを形成しています。
この環境で勝つということは、最適なデータを最適なタイミングで、最小のコストで見つけることを意味します。最も効率的なフィードバックループを構築し、エッジケースをより速く浮き彫りにし、そこからより効果的に学べる企業が、自律走行イノベーションの次の波をリードするでしょう。
これは単なる技術的進化ではありません。戦略上の必須要件です。データ処理の効率は、開発スピード、安全性、市場投入準備、そして事業の実現可能性に直接影響します。
Milvus、Zilliz Cloud、そして Vector Data Lake アーキテクチャのようなソリューションは、この転換を可能にします。AV システムが必要とする深いセマンティック理解を提供しながら、大規模なインフラコストを削減します。
完全自律走行に向けた長い競争において、勝者となるのは最も速く短距離を駆け抜ける者ではなく、最も遠くを見通し、最も速く適応し、データを最も深く掘り起こす者です。ベクトルデータベースとベクトルデータレイクは、この深い理解を可能にし、かつ手頃なものにするツールです。
自動運転データインフラを変革する準備はできていますか?
ベクトルデータベースとベクトルデータレイクが、自動運転データ管理へのアプローチをどのように革新できるかをご覧ください。当社の技術チームは、お客様固有のユースケースに対する潜在的な影響を評価し、カスタマイズされた実装ロードマップを提供するお手伝いができます。
読み続けて
My Wife Wanted Dior. I Spent $600 on Claude Code to Vibe-Code a 2M-Line Database Instead.
Write tests, not code reviews. How a test-first workflow with 6 parallel Claude Code sessions turns a 2M-line C++ codebase into a daily shipping pipeline.
How to Install and Run OpenClaw (Previously Clawdbot/Moltbot) on Mac
Turn your Mac into an AI gateway for WhatsApp, Telegram, Discord, iMessage, and more — in under 5 minutes.
Announcing VDBBench 1.0: Open-Source VectorDB Benchmarking with Your Real-World Production Workloads
Discover VDBBench 1.0, an open-source tool for benchmarking vector databases with real-world production data, streaming ingestion, and concurrent workloads.