


Gauß-Prozesse: Ein umfassender Leitfaden zur probabilistischen Modellierung

Gauß-Prozesse: Ein umfassender Leitfaden zur probabilistischen Modellierung
Maschinelles Lernen Modelle erzeugen traditionell Punktvorhersagen, die das wahrscheinlichste Ergebnis auf der Grundlage der Eingabedaten darstellen. Reale Situationen folgen nicht diesem einfachen Muster. Die Vorhersage zukünftiger Ergebnisse in Finanzsektoren, im Gesundheitswesen und in der Robotik erfordert das Verständnis der Vorhersageergebnisse und der damit verbundenen Unsicherheitsniveaus.
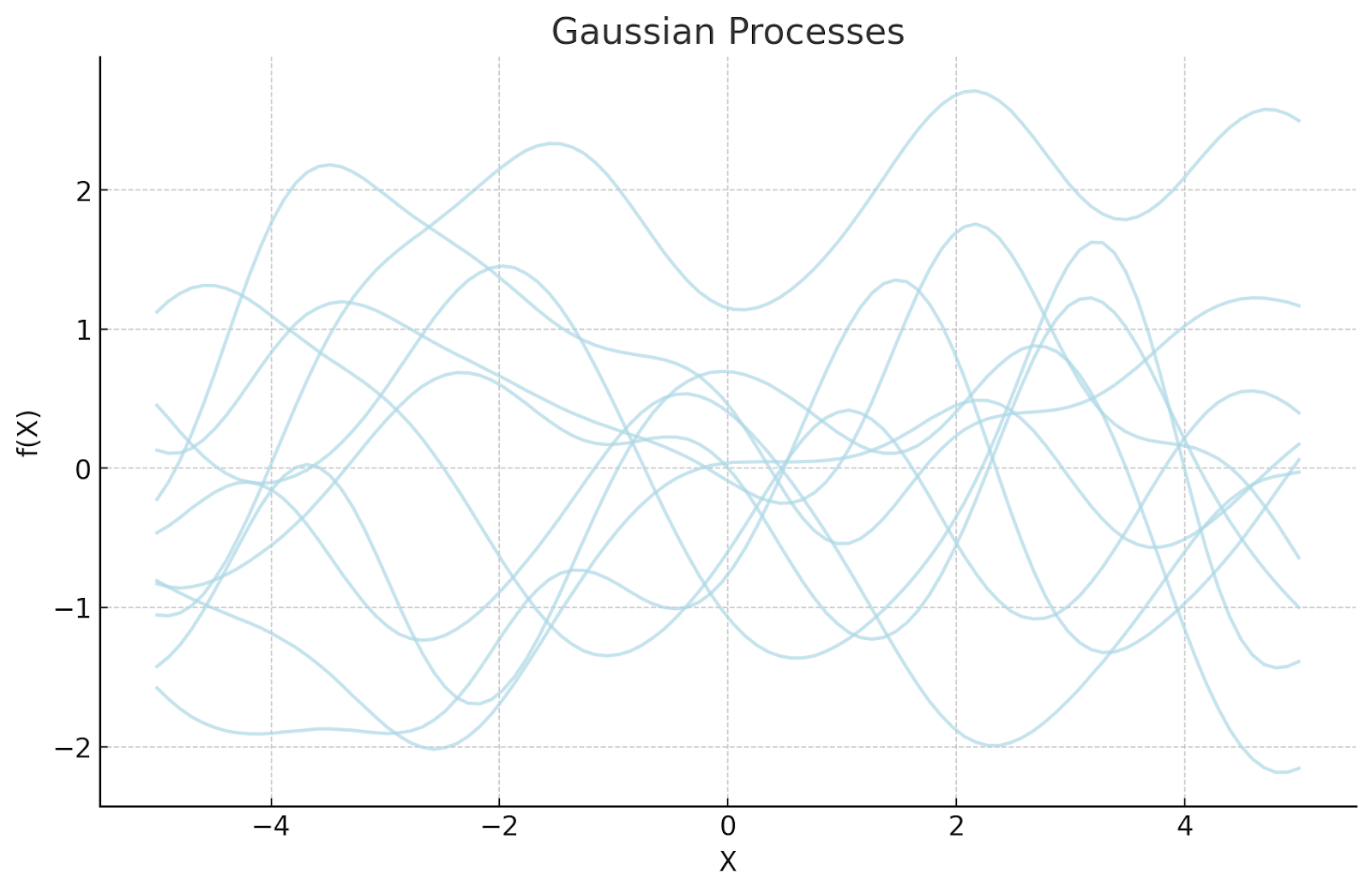 Abbildung 1 - Illustration von Gauß-Prozessen
Abbildung 1 - Illustration von Gauß-Prozessen
Abbildung 1: Illustration von Gauß-Prozessen
Gauß-Prozesse (GPs) dienen als Lösung für diese Herausforderungen. GPs liefern probabilistische Vorhersagen, die einen geschätzten Wert und ein Konfidenzmaß bereitstellen, das das Unsicherheitsniveau der Vorhersage darstellt. GPs sind wertvoll für die probabilistische Modellierung und bieten eine robuste quantitative Unsicherheitsbewertung.
Gauß-Prozesse (GPs) unterscheiden sich von vielen Modellen des maschinellen Lernens, indem sie eine Verteilung über Funktionen definieren, anstatt sich auf feste Parameter zu stützen. Dies ermöglicht es ihnen, sich flexibel an Daten anzupassen und eine explizite Unsicherheitsquantifizierung in Vorhersagen bereitzustellen.
Eine ihrer größten Stärken ist, dass sie gut mit kleinen Datensätzen arbeiten und gleichzeitig Overfitting vermeiden. Sie passen sich außerdem dynamisch an, indem sie neue Informationen einbeziehen, was sie ideal für Situationen macht, in denen Daten begrenzt sind oder sich ständig ändern.
Dieser Leitfaden erklärt Gauß-Prozesse, indem er ihre grundlegenden Konzepte, Funktionsmechanismen und praktischen Anwendungen vorstellt. Wir werden auch die Tools betrachten, die Sie zur Implementierung dieser Prozesse verwenden können.
Was ist der Gauß-Prozess?
Der Gauß-Prozess ist ein flexibles, nichtparametrisches Modell des maschinellen Lernens, das kontinuierliche Funktionen ableitet. Es modelliert Datenbeziehungen, indem es eine Verteilung über Funktionen definiert, anstatt sich auf feste Parameter zu stützen. Der Gauß-Prozess unterscheidet sich von parametrischen Funktionen, weil er sein Verhalten entsprechend den beobachteten Daten anpasst.
GPs sind in der probabilistischen Modellierung besonders nützlich, weil sie sowohl Vorhersagen als auch Unsicherheitsschätzungen liefern. Dies ist durch Bayessche Inferenz möglich, die GPs dabei hilft, ihre Vorhersagen zu verfeinern, sobald neue Daten verfügbar werden.
GPs behalten ihre Flexibilität durch ihre anpassungsfähige Struktur bei, die es ihnen ermöglicht, komplexe Datenstrukturen ohne vordefinierte mathematische Muster zu verarbeiten. Sie sind wertvoll in Regressionsmodellen, Optimierungsproblemen und Prognoseszenarien, die eine Unsicherheitsschätzung benötigen.
Approximationsmethoden ermöglichen die praktische Nutzung dieser Modelle trotz ihrer rechnerischen Komplexität. Die Datenlernfähigkeit von GPs macht sie wertvoll für viele moderne Anwendungen des maschinellen Lernens, insbesondere für solche, die eine Unsicherheitsquantifizierung erfordern.
Wie es funktioniert
Nachdem wir nun die grundlegenden Konzepte von Gauß-Prozessen festgelegt haben, besprechen wir, wie sie Daten modellieren, Beziehungen definieren und zuverlässige Vorhersagen treffen.
Multivariate Normalverteilung
GPs stützen sich auf die multivariate Normalverteilung als ihren grundlegenden Baustein, kombiniert mit Kovarianzfunktionen (Kernels), um Beziehungen zu modellieren und Unsicherheit in Daten zu erfassen. Die Verteilung erweitert die grundlegende Gauß-Verteilung, um mehrere Variablen durch ein einziges probabilistisches Rahmenwerk zu analysieren. GPs nutzen diese Fähigkeit, um komplexe Datenbeziehungen zu konstruieren und gleichzeitig die prädiktive Konsistenz zu bewahren.
Die multivariate Normalverteilung modelliert effektiv Abhängigkeiten zwischen Variablen, was ihr wesentlicher operativer Vorteil ist. Die Kovarianzmatrix fungiert als zentrale Komponente, die den Grad des Einflusses zwischen zwei Variablen festlegt, während sie sich ändern.
Das Prinzip ermöglicht es GPs, Verteilungen zu definieren, die alle möglichen Funktionen repräsentieren, die für beobachtete Daten geeignet sind. Die Trainingspunkte führen dazu, dass ein GP ein probabilistisches Modell erstellt, das beobachtete Daten und unbekannte Punkte umfasst. Die bekannten Werte in den Daten ermöglichen es dem Modell, seine Vorhersage für neue Punkte zu aktualisieren und dabei eine probabilistische und kontinuierliche Interpolation beizubehalten.
Kernels (Kovarianzfunktionen)
Der Gaußsche Prozess definiert Beziehungen zwischen Datenpunkten durch Kernels, die auch als Kovarianzfunktionen bekannt sind. Der Kernel steuert die Informationsübertragung zwischen Punkten und bestimmt funktionale Ausgabemuster. Die Wahl des Kernels bestimmt die Mustertypen, die das Modell erkennt, einschließlich periodischer Muster sowie glatter und abrupter Änderungen. Beliebte Kernel-Funktionen umfassen:
Quadratisch-exponentieller Kernel: Er erzeugt glatte, kontinuierliche Muster und eignet sich daher für die meisten Regressionsanwendungen. Das Modell sagt voraus, dass Punkte, die näher beieinander liegen, höhere Korrelationsniveaus aufweisen.
Matérn-Kernel: Der Kernel ermöglicht es Benutzern, den Grad der Funktionsglattheit festzulegen, wodurch er auf Datensätze mit unregelmäßigen Mustern und abrupten Änderungen anwendbar ist.
Periodischer Kernel: Dieser erkennt sich wiederholende Datenmuster und saisonale Effekte, wodurch er für die Vorhersage von Zeitreihendaten und die Erkennung zyklischer Muster geeignet ist.
Linearer Kernel: Er ist ein effektives Modell zur Erkennung linearer Beziehungen, was dabei hilft, lineare Abhängigkeiten in Daten zu entdecken.
GPs erreichen eine bessere Genauigkeit und Interpretierbarkeit, wenn Benutzer geeignete Kernels für verschiedene Datensätze auswählen.
Nichtparametrische Modelle
Gaußsche Prozesse funktionieren als nichtparametrische Methoden, weil sie keine Annahmen über feste Gleichungsbeschreibungen für Daten treffen. Das Modell leitet Muster aus beobachteten Punkten ab, ohne eine feste Gleichung vorzugeben.
GPs bewahren ihre Flexibilität, weil sie komplexe, sich entwickelnde Funktionen durch neue Dateneingaben verarbeiten können. GPs erweitern ihre Komplexität durch Datenerfassung, weil sie keine festen mathematischen Strukturen wie parametrische Modelle verwenden. Solche Anwendungen profitieren enorm von der Verwendung von GPs, da sie sich an unbekannte oder sich ändernde Funktionen anpassen können.
Gemeinsame und bedingte Wahrscheinlichkeit
Der Vorhersageprozess von GPs hängt von der Verwendung gemeinsamer und bedingter Wahrscheinlichkeitsverteilungen ab. Ein GP erstellt eine gemeinsame Gaußsche Verteilungsstruktur für beobachtete Datenpunkte. Jeder neue Punkt führt dazu, dass das Modell seine Vorhersagen auf der Grundlage zuvor beobachteter Daten konditioniert.
Der Schätzprozess wird durch Bayessche Inferenz möglich, weil neue Daten dabei helfen, Funktionsvorhersagen zu verbessern, ohne zuvor erworbenes Wissen zu verlieren. Das Modell erzeugt sowohl Vorhersagewerte als auch Unsicherheitsmaße, die zu Konfidenzintervallen werden. Diese Eigenschaft macht Schätzungen für wesentliche Anwendungen, einschließlich Robotik, Finanzen und Gesundheitswesen, vertrauenswürdig.
Hyperparameter und ihr Einfluss
Das GP-Modell arbeitet unter der Kontrolle von Hyperparametern, die Kernel-Aktionen und Modellanpassungsfähigkeit definieren. Wichtige Hyperparameter umfassen:
Längenskala: Der Parameter der Längenskala steuert die Geschwindigkeit, mit der Korrelationen abnehmen, und bestimmt die Glattheit der resultierenden Funktionen. Die Längenskala des Modells steuert die Änderungsgeschwindigkeit und die Erkennung detaillierter Muster, beeinflusst aber auch die Etablierung breiterer Datentrends.
Varianz: Der Varianzparameter steuert direkt, wie stark sich die Funktionswerte über den Definitionsbereich verteilen, was die Unsicherheitsvorhersagen beeinflusst. Eine höhere Varianz erhöht die Fähigkeit des Modells, signifikante Änderungen von Funktionswerten zu erkennen, aber eine geringere Varianz erzeugt risikoaversere Vorhersagen.
Rauschpegel: Der Rauschpegel-Parameter in gaußschen Prozessen unterscheidet tatsächliche Datensignale von zufälligem Rauschen, indem er die Datenvariabilität berücksichtigt. Er reguliert die Messunsicherheit, um eine Überanpassung an verrauschte Beobachtungen zu verhindern, lässt jedoch zuverlässige Messungen passieren.
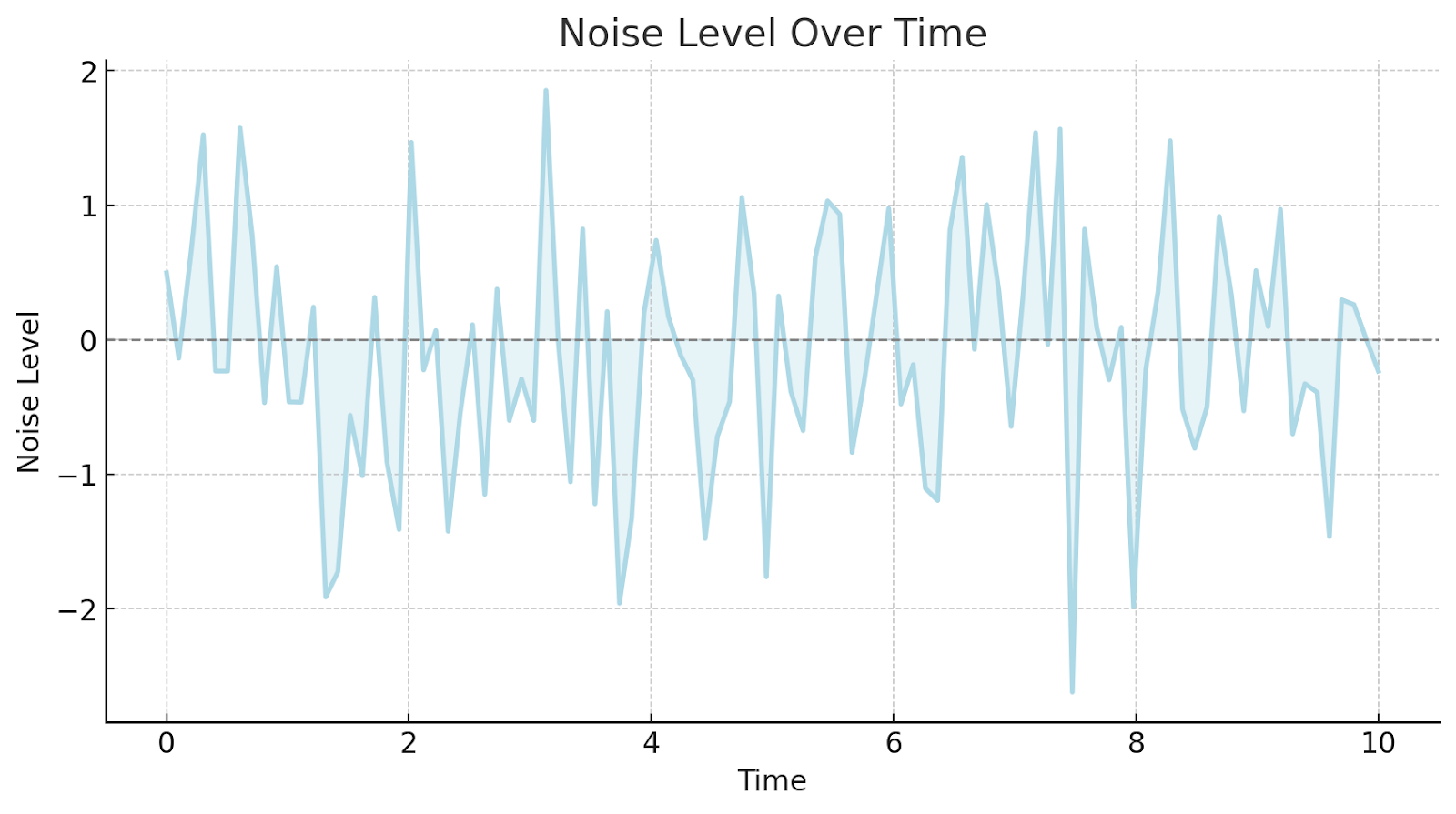 Abbildung 2 - Rauschpegel im Zeitverlauf
Abbildung 2 - Rauschpegel im Zeitverlauf
Abbildung 2: Rauschpegel im Zeitverlauf
Genaue Vorhersagen erfordern die Anpassung dieser Hyperparameter. Optimierungstechniken wie Maximum-Likelihood-Schätzung und bayessche Optimierung ermitteln optimale Parameterwerte für bestimmte Datensätze.
Verbindungen zu anderen Modellen
Gaußsche Prozesse arbeiten unabhängig, teilen jedoch zentrale Prinzipien mit mehreren Machine-Learning-Modellen. Die Beziehungen zwischen GPs und anderen Methoden helfen, ihre Stärken und geeigneten Anwendungen zu erklären.
Relevance Vector Machines (RVMs)
GPs zeigen eine parallele Funktionalität zu Relevance Vector Machines (RVMs), da beide probabilistische Vorhersagemodelle verwenden. RVMs arbeiten mit einem begrenzten Satz von Basisfunktionen, was zu einer besseren Rechenleistung führt. GPs stellen kontinuierliche Funktionsverteilungen bereit, die detailliertere Unsicherheitsvorhersagen erzeugen als andere Modelle.
Die bayessche Inferenz von RVMs hängt von Annahmen zur Datensparsität ab, aber GPs modellieren Unsicherheit über Kernelfunktionen ohne diese Einschränkungen. GPs eignen sich besser für Situationen, die präzise Berechnungen von Konfidenzintervallen und anpassungsfähige Fähigkeiten zur Funktionsschätzung erfordern.
Kalman-Filterung
Die probabilistischen Modellierungsfähigkeiten gaußscher Prozesse entsprechen denen von Kalman-Filtern durch ihre gemeinsame Fähigkeit, mit Unsicherheit umzugehen. Kalman-Filter zeichnen sich in linearen dynamischen Systemen durch rekursive Schätztechniken aus, wodurch sie in Echtzeit-Tracking- und Steuerungssystemen effektiv funktionieren können.
GPs liefern ein verallgemeinertes Modellierungssystem, das vielfältige Datenstrukturen durch nichtlineare Funktionen verarbeitet. Markovsche Zustandsabhängigkeiten bilden die Grundlage von Kalman-Filtern, aber GPs stellen ihre Beziehungen durch Kovarianzstrukturen her, die flexible und glatte Funktionsapproximationen unterstützen.
Vergleich mit anderen Machine-Learning-Modellen
GPs bieten besondere Vorteile, erfordern jedoch einen Vergleich mit Standard-Machine-Learning-Modellen, um geeignete Anwendungen und Einschränkungen zu bestimmen.
| Aspekt | Gaußsche Prozesse (GPs) | Neuronale Netze (NNs) | Support Vector Machines (SVMs) |
| Modelltyp | Nichtparametrisch, probabilistisch | Parametrisch, auf Deep Learning basierend | Parametrisch, margin-basiert |
| Unsicherheitsquantifizierung | Liefert Konfidenzintervalle | Begrenzt, außer bei bayesschen NNs | Erfordert zusätzliche Methoden |
| Skalierbarkeit | O(N³)-Komplexität, weniger geeignet für große Datensätze | Skaliert gut mit großen Datensätzen | Effizient für kleinere Datensätze |
| Flexibilität | Kernel-Wahl bestimmt die Anpassungsfähigkeit | Kann hochkomplexe Funktionen modellieren | Kernel-abhängige Flexibilität |
| Interpretierbarkeit | Moderat; Kernel liefern Einblicke | Niedrig; oft als „Black Box“ betrachtet | Moderat; Entscheidungsgrenze explizit |
| Anforderungen an Trainingsdaten | Funktioniert gut mit kleinen Datensätzen | Erfordert große Datensätze | Effektiv mit mittelgroßen Datensätzen |
| Anwendungen | Regression, Prognosen, bayessche Optimierung | Bild-, Spracherkennung, NLP | Klassifikation, Bioinformatik |
Vorteile und Herausforderungen
GPs sind Machine-Learning-Ansätze, die erhebliche Vorteile und technische Einschränkungen mit sich bringen. Das Verständnis sowohl der Vorteile als auch der Einschränkungen hilft dabei, geeignete Einsatzszenarien für GPs zu bestimmen.
Vorteile
Probabilistisches Framework: GPs definieren Funktionsverteilungen für prädiktive Ergebnisse und Konfidenzschätzungen. Diese Modelle eignen sich besonders für Diagnosesysteme und Risikobewertungen, die präzise Unsicherheitsberechnungen benötigen.
Nichtparametrische Natur: Die Modellstruktur von GPs bleibt unabhängig von einer vorgegebenen Funktionsform. Dies zeigt dynamische Fähigkeiten zur Musteranpassung, da sie sich an komplexe Datenstrukturen anpassen.
Einbindung von Vorwissen: Die Mittelwert- und Kovarianzfunktionen ermöglichen es GPs, domänenspezifisches Wissen in ihren Modellierungsprozess einzubeziehen. Die Ergänzung historischer Daten oder Experteneinsichten verbessert durch GPs die Modellgenauigkeit.
Vielseitigkeit über Domänen hinweg: GPs dienen effektiv der Geostatistik, Zeitreihenprognose und bayesschen Optimierung und erweisen sich als nützlich für anpassungsfähige Funktionsmodellierung.
Inferenz in geschlossener Form: Gaußsche Prozesse liefern exakte Posterior-Lösungen für Regression mit gaußschem Rauschen und ermöglichen so effiziente Inferenz ohne langwierige numerische Approximationen.
Herausforderungen
Rechnerische Skalierbarkeit: GPs benötigen O(N³)-Operationen (kubische Zeitkomplexität in der Anzahl der Datenpunkte, N), um zu funktionieren, was bei großen Datensätzen zu hohen Rechenkosten führt. Approximationsmethoden, die als sparse GPs bekannt sind, bieten eine bessere Effizienz, führen jedoch neue Einschränkungen für das Modell ein.
Empfindlichkeit bei der Kernel-Auswahl: Die Auswahl der Kernel-Funktion bleibt ein entscheidender Faktor dafür, wie genau GPs Daten modellieren. Die Verwendung einer ungeeigneten Kernel-Auswahl führt zu Generalisierungsproblemen, die gründliche Tuning- und Validierungsschritte erfordern.
Begrenzte Extrapolationsfähigkeit: Die Generalisierung über bekannte Bereiche hinaus bleibt für GPs eine Herausforderung, da sie bei Interpolation besser abschneiden als bei Extrapolation. Das Modell stützt sich auf beobachtete Daten, was außerhalb dieser Bereiche zu unzuverlässigen Vorhersagen führt.
Hyperparameter-Optimierung: Das Finden geeigneter Hyperparameter, einschließlich Längenskala und Varianz, ist schwierig. Bayessche Optimierung ist ein automatisiertes System, das die Effizienz von Parameteranpassungen erhöht.
Implementierungskomplexität: Die Implementierung von GPs erfordert fortgeschrittene Mathematik, wie Bayessche Inferenz und die Analyse von Kovarianzfunktionen. Eine erfolgreiche Implementierung und Abstimmung erfordern ein vollständiges Verständnis dieser Konzepte.
Anwendungsfälle
GPs werden aufgrund ihrer Flexibilität und Fähigkeit, Unsicherheit zu quantifizieren, in verschiedenen realen Anwendungen breit eingesetzt. Zu den wichtigsten Anwendungsfällen gehören:
Zeitreihenprognose: GPs eignen sich hervorragend zur Prognose zukünftiger Datenpunkte und liefern dabei präzise Unsicherheitsmessungen. Finanzmärkte, Klimamodellierung und Nachfrageprognosen verwenden GPs als Standardwerkzeuge, weil sie genaue Vorhersagen mit Konfidenzintervallen liefern.
Räumliche Datenanalyse: GPs sind robuste Werkzeuge für die räumliche Datenanalyse. Sie extrahieren räumliche Beziehungen aus Umweltüberwachungsdaten, Landnutzungsinformationen und meteorologischen Beobachtungen. Geostatistik-Anwendungen verwenden diese Modelle hauptsächlich für Kriging-Operationen.
Hyperparameteroptimierung: GPs sind in der Bayesschen Optimierung von entscheidender Bedeutung, bei der Machine-Learning-Parameter, Deep-Learning-Strukturen und Versuchspläne mit kostspieligen Funktionsauswertungen optimiert werden.
Anomalieerkennung: GPs eignen sich hervorragend zur Erkennung von Anomalien, was sich als wesentlich für die Betrugserkennung sowie die Wartung prädiktiver Gerätesysteme und die medizinische Diagnostik erweist.
Reinforcement Learning: GPs unterstützen Entscheidungsfindungssysteme durch Reinforcement Learning, insbesondere wenn Unsicherheitsmodellierung in Robotik, autonomen Systemen und Gameplay unerlässlich bleibt.
Tools und Bibliotheken
Spezialisierte Tools sind für eine effiziente GP-Implementierung erforderlich, da sie Modelltraining, Inferenz- und Optimierungsaufgaben vereinfachen. Verschiedene Bibliotheken bieten umfassende Frameworks, die es Praktikern ermöglichen, GPs für praktische Anwendungen zu nutzen. Einige der Tools umfassen:
GPy: Eine benutzerfreundliche Bibliothek zur Durchführung von Gaussian-Process-Modellierung. Sie bietet eine einfache Schnittstelle für Kerneldefinition, Modellanpassung und Vorhersageaufgaben.
GPflow: Eine großskalige Gaussian-Process-Bibliothek, die auf TensorFlow basiert. Sie unterstützt moderne Optimierungsansätze, einschließlich variationaler Inferenz, wodurch sie ideal für skalierbare Anwendungen ist.
Scikit-learn: Es bietet eine unkomplizierte Implementierung von GP-Regression und Klassifikation, sodass Anfänger und Praktiker damit arbeiten können.
GPyTorch: Eine Gaussian-Process-Bibliothek, die auf PyTorch aufbaut, ermöglicht skalierbare Inferenz und unterstützt die Integration von Deep Kernel Learning.
Stan: Eine probabilistische Programmier-Sprache, die GP-Modellierung durch Anwendungen der Bayesschen Inferenz implementiert.
Emukit: Ein Toolkit für Bayessche Optimierung und probabilistische Modellierungswerkzeuge, die bei der Implementierung von GPs für Entscheidungsfindungsanforderungen helfen.
FAQs
Wofür werden Gaussian Processes verwendet?
GPs werden für Regression, Klassifikation und Bayessche Optimierung verwendet und liefern probabilistische Vorhersagen mit Unsicherheitsschätzungen. Sie werden in ML, Geostatistik und Zeitreihenprognosen eingesetzt.
Wie gehen Gaussian Processes mit Unsicherheit um?
GPs verwalten Unsicherheit, indem sie Wahrscheinlichkeitsverteilungen über alle Funktionen definieren, die zu beobachteten Datenpunkten passen. Dies ermöglicht Vorhersagen mit berechneten Mittelwerten und quantifizierten Konfidenzintervallen.
Was ist ein Kernel im Kontext von Gaussian Processes?
GPs verwenden Kernel als Kovarianzfunktionen, um Ähnlichkeiten zwischen Datenpunkten zu identifizieren, indem sie Prozesskovarianzstrukturen definieren. Der gewählte Kernel beeinflusst die Glattheit des Modells.
Können Gaussian Processes für große Datensätze verwendet werden?
Traditionelle GPs stehen bei großen Datensätzen aufgrund ihrer kubischen Zeitkomplexität vor rechnerischen Herausforderungen, aber die Skalierbarkeit wurde durch sparse Approximationen wie sparse GPs verbessert.
Wie schneiden Gaußsche Prozesse im Vergleich zu neuronalen Netzwerken ab?
GPs liefern Vorhersagen, die präzise Unsicherheitsmessungen beinhalten. Neuronale Netzwerke liefern deterministische Ergebnisse, benötigen jedoch umfangreiche Datensätze, um vergleichbare Leistungsergebnisse zu erzielen.
Verwandte Ressourcen
- Was ist der Gauß-Prozess?
- Wie es funktioniert
- Vergleich mit anderen Machine-Learning-Modellen
- Vorteile und Herausforderungen
- Anwendungsfälle
- Tools und Bibliotheken
- FAQs
- Verwandte Ressourcen
Inhalte
Kostenlos starten, einfach skalieren
Testen Sie die vollständig verwaltete Vektordatenbank, die für Ihre GenAI-Anwendungen entwickelt wurde.
Zilliz Cloud kostenlos ausprobieren