




Processi Gaussiani: una guida completa alla modellazione probabilistica

Processi Gaussiani: una guida completa alla modellazione probabilistica
I modelli di machine learning producono tradizionalmente previsioni puntuali, che rappresentano l’esito più probabile in base ai dati di input. Le situazioni della vita reale non seguono questo schema semplice. Prevedere esiti futuri nei settori finanziario, sanitario e della robotica richiede di comprendere i risultati delle previsioni e i relativi livelli di incertezza.
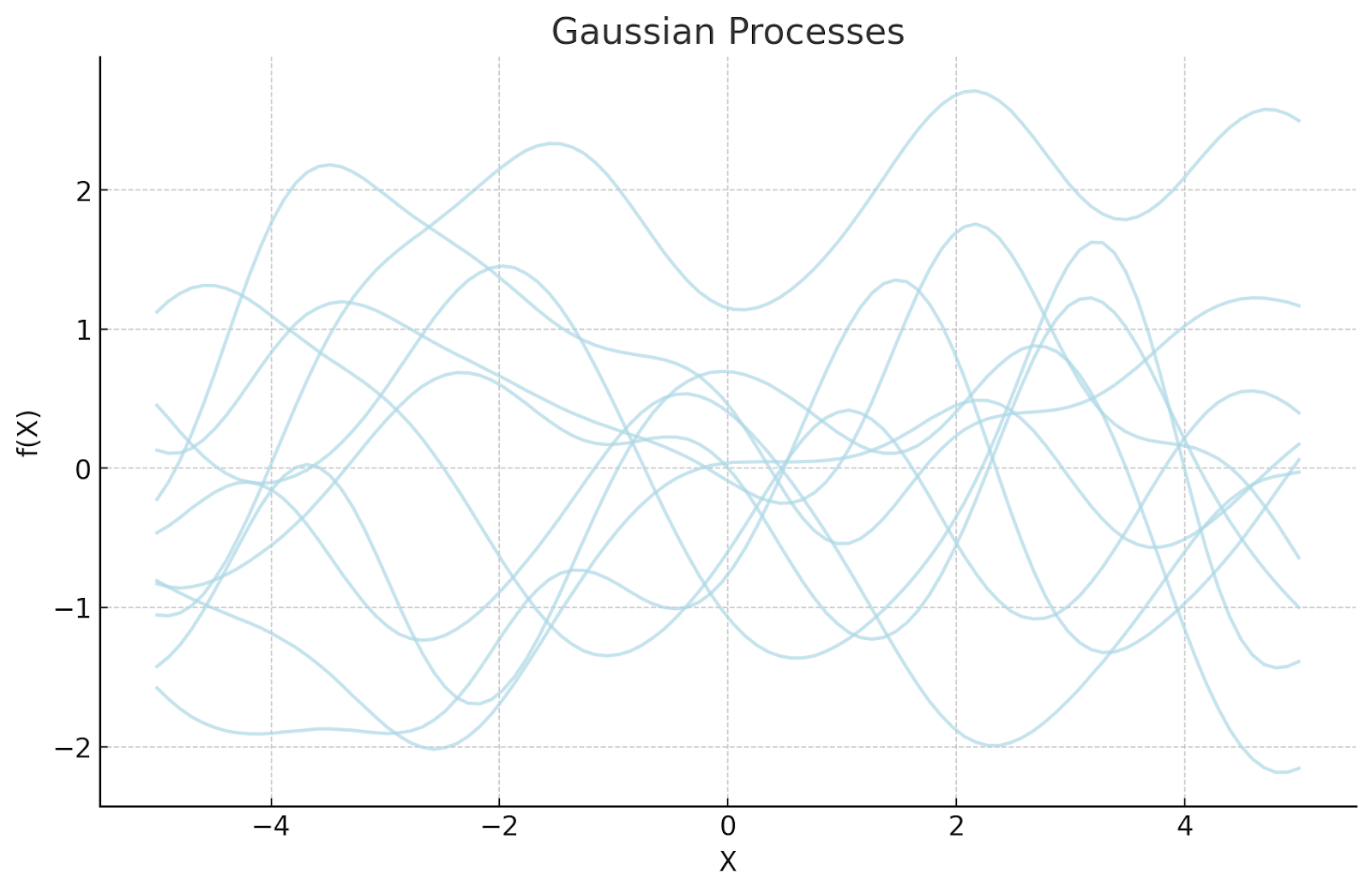 Figura 1 - Illustrazione dei Processi Gaussiani
Figura 1 - Illustrazione dei Processi Gaussiani
Figura 1: Illustrazione dei Processi Gaussiani
I Processi Gaussiani (GP) rappresentano una soluzione a queste sfide. I GP forniscono previsioni probabilistiche che offrono un valore stimato e una misura di confidenza, rappresentando il livello di incertezza della previsione. I GP sono preziosi per la modellazione probabilistica, offrendo una solida valutazione quantitativa dell’incertezza.
I Processi Gaussiani (GP) si differenziano da molti modelli di machine learning perché definiscono una distribuzione sulle funzioni invece di basarsi su parametri fissi. Questo consente loro di adattarsi in modo flessibile ai dati e di fornire una quantificazione esplicita dell’incertezza nelle previsioni.
Uno dei loro maggiori punti di forza è la capacità di funzionare bene con piccoli dataset evitando al contempo l’overfitting. Si adattano inoltre dinamicamente incorporando nuove informazioni, rendendoli ideali per situazioni in cui i dati sono limitati o cambiano costantemente.
Questa guida spiega i processi Gaussiani presentandone i concetti fondamentali, i meccanismi operativi e le applicazioni pratiche. Vedremo anche gli strumenti che puoi utilizzare per implementare questi processi.
Che cos’è il Processo Gaussiano?
Il processo Gaussiano è un modello di machine learning flessibile e non parametrico che inferisce funzioni continue. Modella le relazioni tra i dati definendo una distribuzione sulle funzioni anziché basarsi su parametri fissi. Il processo Gaussiano differisce dalle funzioni parametriche perché regola il proprio comportamento in base ai dati osservati.
I GP sono particolarmente utili nella modellazione probabilistica perché forniscono sia previsioni sia stime dell’incertezza. Questo è possibile tramite l’inferenza bayesiana, che aiuta i GP a perfezionare le proprie previsioni man mano che nuovi dati diventano disponibili.
I GP mantengono la flessibilità grazie alla loro struttura adattabile, che consente loro di gestire strutture di dati complesse senza schemi matematici predefiniti. Sono preziosi nei modelli di regressione, nei problemi di ottimizzazione e negli scenari di previsione che richiedono la stima dell’incertezza.
I metodi di approssimazione consentono l’utilizzo pratico di questi modelli nonostante la loro complessità computazionale. La capacità dei GP di apprendere dai dati li rende preziosi per molte applicazioni contemporanee di machine learning, in particolare quelle che richiedono la quantificazione dell’incertezza.
Come funziona
Ora che abbiamo stabilito i concetti fondamentali dei processi Gaussiani, discutiamo di come modellano i dati, definiscono le relazioni e producono previsioni affidabili.
Distribuzione normale multivariata
I GP si basano sulla distribuzione normale multivariata come elemento fondamentale, combinata con funzioni di covarianza (kernel) per modellare le relazioni e catturare l’incertezza nei dati. La distribuzione estende la distribuzione Gaussiana fondamentale per analizzare più variabili attraverso un unico framework probabilistico. I GP utilizzano questa capacità per costruire relazioni complesse tra i dati mantenendo al contempo la coerenza predittiva.
La distribuzione normale multivariata modella efficacemente le dipendenze tra variabili, il che rappresenta il suo principale vantaggio operativo. La matrice di covarianza funziona come componente centrale che stabilisce il grado di influenza tra due variabili mentre cambiano.
Il principio consente ai GP di definire distribuzioni che rappresentano tutte le possibili funzioni adatte ai dati osservati. I punti di addestramento portano un GP a creare un modello probabilistico che include i dati osservati e i punti sconosciuti. I valori noti nei dati consentono al modello di aggiornare la propria previsione per nuovi punti mantenendo un'interpolazione probabilistica e continua.
Kernel (Funzioni di covarianza)
Il Processo Gaussiano definisce le relazioni tra i punti dati attraverso kernel, noti anche come funzioni di covarianza. Il kernel controlla la trasmissione delle informazioni tra i punti, determinando i pattern dell'output funzionale. La scelta del kernel determina i tipi di pattern che il modello rileva, inclusi i pattern periodici insieme a cambiamenti fluidi e bruschi. Le funzioni kernel più diffuse includono:
Kernel esponenziale quadratico: Crea pattern fluidi e continui, rendendolo adatto alla maggior parte delle applicazioni di regressione. Il modello prevede che i punti più vicini tra loro dimostrino livelli più elevati di correlazione.
Kernel di Matérn: Il kernel consente agli utenti di specificare il livello di fluidità della funzione, rendendolo così applicabile a set di dati caratterizzati da pattern irregolari e cambiamenti bruschi.
Kernel periodico: Riconosce pattern di dati ripetitivi ed effetti stagionali, il che lo rende adatto alla previsione di dati di serie temporali e al rilevamento di pattern ciclici.
Kernel lineare: È un modello efficace per rilevare relazioni lineari, il che aiuta a scoprire dipendenze lineari nei dati.
I GP ottengono una migliore accuratezza e interpretabilità quando gli utenti selezionano kernel appropriati per diversi dataset.
Modelli non parametrici
I processi gaussiani funzionano come metodi non parametrici perché evitano di fare assunzioni su descrizioni di equazioni fisse per i dati. Il modello trae pattern dai punti osservati senza imporre alcuna equazione fissa.
I GP mantengono flessibilità perché possono gestire funzioni complesse e in evoluzione attraverso nuovi input di dati. I GP espandono la loro complessità attraverso la raccolta di dati perché non utilizzano strutture matematiche fisse come i modelli parametrici. Tali applicazioni traggono enorme beneficio dall'uso dei GP grazie alla loro capacità di adattarsi a funzioni sconosciute o mutevoli.
Probabilità congiunta e condizionata
Il processo predittivo dei GP dipende dall'uso di distribuzioni di probabilità congiunte e condizionate. Un GP crea una struttura di distribuzione gaussiana congiunta per i punti dati osservati. Ogni nuovo punto porta il modello a condizionare le proprie previsioni in base ai dati osservati in precedenza.
Il processo di stima diventa possibile attraverso l'inferenza bayesiana perché i nuovi dati aiutano a migliorare le previsioni della funzione senza perdere le conoscenze acquisite in precedenza. Il modello produce sia valori predittivi sia misure di incertezza che diventano intervalli di confidenza. Questa funzionalità rende le stime affidabili per applicazioni essenziali, tra cui robotica, finanza e sanità.
Iperparametri e la loro influenza
Il modello GP opera sotto il controllo degli iperparametri, che definisce le azioni del kernel e l'adattabilità del modello. Gli iperparametri chiave includono:
Scala di lunghezza: Il parametro della scala di lunghezza controlla la velocità con cui le correlazioni diminuiscono, determinando la fluidità delle funzioni risultanti. La scala di lunghezza del modello controlla la velocità del cambiamento e il rilevamento di pattern dettagliati, ma influisce anche sulla definizione di tendenze più ampie nei dati.
Varianza: Il parametro di varianza controlla direttamente quanto i valori della funzione si distribuiscono sul dominio, il che influisce sulle previsioni di incertezza. Una varianza più elevata aumenta la capacità del modello di rilevare cambiamenti significativi nei valori della funzione, ma una varianza più bassa produce previsioni più avverse al rischio.
Livello di rumore: Il parametro livello di rumore nei processi gaussiani distingue i segnali effettivi dei dati dal rumore casuale tenendo conto della variabilità dei dati. Regola l’incertezza della misurazione per prevenire l’overfitting delle osservazioni rumorose, ma consente alle misurazioni affidabili di passare.
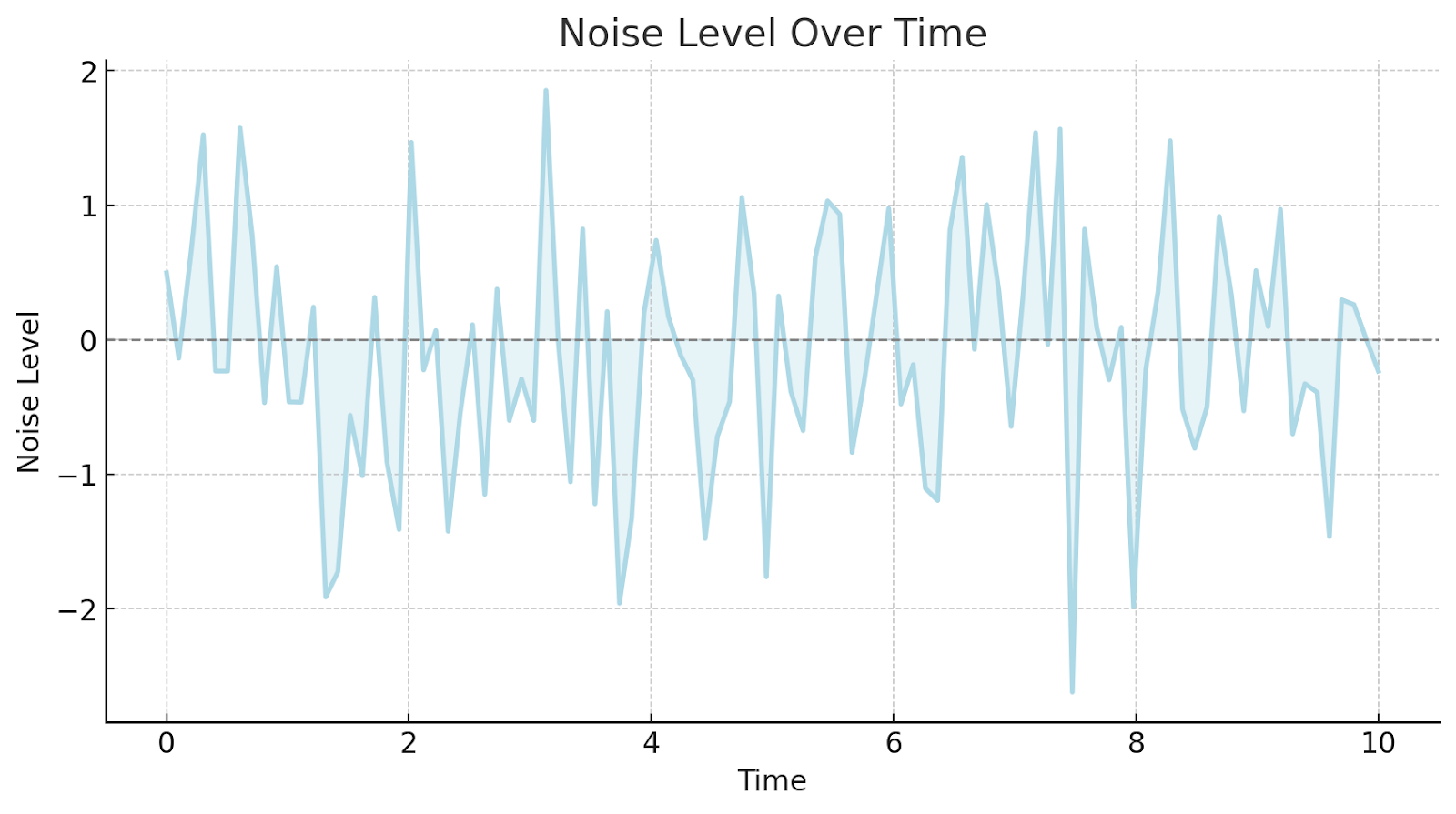 Figura 2 - Livello di rumore nel tempo
Figura 2 - Livello di rumore nel tempo
Figura 2: Livello di rumore nel tempo
Previsioni accurate richiedono la regolazione di questi iperparametri. Le tecniche di ottimizzazione, come la stima di massima verosimiglianza e l’ottimizzazione bayesiana, individuano i valori ottimali dei parametri per dataset specifici.
Connessioni con altri modelli
I processi gaussiani operano in modo indipendente, ma condividono principi chiave con molteplici modelli di machine learning. Le relazioni tra i GP e altri metodi aiutano a spiegare i loro punti di forza e le applicazioni adatte.
Relevance Vector Machines (RVM)
I GP dimostrano funzionalità parallele alle Relevance Vector Machines (RVM) perché entrambi impiegano modelli di previsione probabilistici. Le RVM operano con un insieme limitato di funzioni di base, il che si traduce in migliori prestazioni computazionali. I GP forniscono distribuzioni di funzioni continue che generano previsioni dell’incertezza più dettagliate rispetto ad altri modelli.
L’inferenza bayesiana delle RVM dipende da assunzioni di sparsità dei dati, ma i GP modellano l’incertezza tramite funzioni kernel senza questi vincoli. I GP sono migliori per situazioni che richiedono calcoli precisi degli intervalli di confidenza e capacità adattabili di stima delle funzioni.
Filtraggio di Kalman
Le capacità di modellazione probabilistica dei processi gaussiani corrispondono a quelle dei filtri di Kalman grazie alla loro comune capacità di gestire l’incertezza. I filtri di Kalman eccellono nei sistemi dinamici lineari tramite tecniche di stima ricorsiva, il che consente loro di funzionare efficacemente nei sistemi di tracciamento e controllo in tempo reale.
I GP offrono un sistema di modellazione generalizzato che gestisce diverse strutture di dati tramite funzioni non lineari. Le dipendenze di stato markoviane costituiscono la base dei filtri di Kalman, ma i GP stabiliscono le loro relazioni tramite strutture di covarianza, che supportano approssimazioni di funzioni flessibili e fluide.
Confronto con altri modelli di machine learning
I GP presentano vantaggi distintivi, ma richiedono un confronto con i modelli standard di machine learning per determinarne le applicazioni e le limitazioni appropriate.
| Aspetto | Processi gaussiani (GP) | Reti neurali (NN) | Macchine a vettori di supporto (SVM) |
| Tipo di modello | Non parametrico, probabilistico | Parametrico, basato sul deep learning | Parametrico, basato sul margine |
| Quantificazione dell’incertezza | Fornisce intervalli di confidenza | Limitata, tranne che per le NN bayesiane | Richiede metodi aggiuntivi |
| Scalabilità | Complessità O(N³), meno adatto a grandi dataset | Scala bene con grandi dataset | Efficiente per dataset più piccoli |
| Flessibilità | La scelta del kernel determina l’adattabilità | Può modellare funzioni altamente complesse | Flessibilità dipendente dal kernel |
| Interpretabilità | Moderata; i kernel forniscono intuizioni | Bassa; spesso considerate una "scatola nera" | Moderata; confine decisionale esplicito |
| Requisiti dei dati di training | Funziona bene con dataset piccoli | Richiede dataset grandi | Efficace con dataset di medie dimensioni |
| Applicazioni | Regressione, previsione, ottimizzazione bayesiana | Riconoscimento di immagini e del parlato, NLP | Classificazione, bioinformatica |
Vantaggi e sfide
I GP sono approcci di machine learning che offrono vantaggi sostanziali e vincoli tecnici. Comprendere sia i vantaggi sia i limiti aiuta a determinare gli scenari di utilizzo appropriati per i GP.
Vantaggi
Framework probabilistico: I GP definiscono distribuzioni di funzioni per risultati predittivi e stime di confidenza. Questi modelli eccellono nei sistemi diagnostici e nelle valutazioni del rischio che richiedono calcoli precisi dell’incertezza.
Natura non parametrica: La struttura del modello dei GP rimane indipendente da qualsiasi forma di funzione predeterminata. Ciò dimostra capacità dinamiche di adattamento ai pattern perché si adattano a strutture di dati complesse.
Incorporazione della conoscenza a priori: Le funzioni di media e covarianza consentono ai GP di incorporare conoscenze specifiche del dominio nel loro processo di modellazione. L’aggiunta di dati storici o intuizioni di esperti migliora l’accuratezza del modello tramite i GP.
Versatilità tra domini: I GP servono efficacemente geostatistica, previsione di serie temporali e ottimizzazione bayesiana, dimostrandosi utili per la modellazione adattabile di funzioni.
Inferenza in forma chiusa: I processi gaussiani forniscono soluzioni posteriori esatte per la regressione con rumore gaussiano, consentendo un’inferenza efficiente senza lunghe approssimazioni numeriche.
Sfide
Scalabilità computazionale: I GP necessitano di operazioni O(N³) (complessità temporale cubica nel numero di punti dati, N) per funzionare, il che comporta costi computazionali elevati per grandi dataset. I metodi di approssimazione noti come GP sparsi offrono una maggiore efficienza, ma introducono nuove limitazioni nel modello.
Sensibilità alla selezione del kernel: La selezione della funzione kernel rimane un fattore critico nel determinare quanto accuratamente i GP modellano i dati. L’utilizzo di una selezione del kernel inappropriata comporta problemi di generalizzazione che richiedono passaggi approfonditi di tuning e validazione.
Capacità di estrapolazione limitata: La generalizzazione oltre le aree note rimane impegnativa per i GP, che funzionano meglio con l’interpolazione che con l’estrapolazione. Il modello si basa sui dati osservati, portando a previsioni inaffidabili al di fuori di queste aree.
Ottimizzazione degli iperparametri: Trovare iperparametri appropriati, inclusi scala di lunghezza e varianza, è difficile. L’ottimizzazione bayesiana è un sistema automatizzato che migliora l’efficienza degli aggiustamenti dei parametri.
Complessità di implementazione: Implementare i GP richiede matematica avanzata, come l'inferenza bayesiana e l'analisi delle funzioni di covarianza. Un'implementazione e una messa a punto efficaci richiedono una comprensione completa di questi concetti.
Casi d'uso
I GP sono ampiamente utilizzati in varie applicazioni reali grazie alla loro flessibilità e capacità di quantificare l'incertezza. Alcuni dei principali casi d'uso includono:
Previsione di serie temporali: I GP eccellono nella previsione di punti dati futuri producendo al contempo misurazioni precise dell'incertezza. I mercati finanziari, la modellazione climatica e la previsione della domanda usano i GP come strumenti standard perché forniscono previsioni accurate con intervalli di confidenza.
Analisi dei dati spaziali: I GP sono strumenti robusti per l'analisi dei dati spaziali. Estraggono relazioni spaziali dai dati di monitoraggio ambientale, dalle informazioni sull'uso del suolo e dalle osservazioni meteorologiche. Le applicazioni di geostatistica utilizzano principalmente questi modelli per operazioni di kriging.
Ottimizzazione degli iperparametri: I GP sono fondamentali nell'ottimizzazione bayesiana, ottimizzando parametri di machine learning, strutture di deep learning e progetti sperimentali che comportano valutazioni di funzioni costose.
Rilevamento delle anomalie: I GP eccellono nel rilevare anomalie, il che si rivela essenziale per individuare frodi e mantenere sistemi predittivi per apparecchiature e diagnostica medica.
Apprendimento per rinforzo: I GP supportano i sistemi decisionali attraverso l'apprendimento per rinforzo, soprattutto quando la modellazione dell'incertezza rimane essenziale nella robotica, nei sistemi autonomi e nel gameplay.
Strumenti e librerie
Sono necessari strumenti specializzati per un'implementazione efficiente dei GP perché semplificano l'addestramento dei modelli, l'inferenza e le attività di ottimizzazione. Diverse librerie offrono framework completi che consentono ai professionisti di utilizzare i GP per applicazioni pratiche. Alcuni degli strumenti includono:
GPy: Una libreria intuitiva per eseguire la modellazione con processi gaussiani. Fornisce un'interfaccia semplice per la definizione dei kernel, l'adattamento del modello e le attività di previsione.
GPflow: Una libreria per processi gaussiani su larga scala costruita su TensorFlow. Supporta approcci di ottimizzazione moderni, inclusa l'inferenza variazionale, rendendola ideale per applicazioni scalabili.
Scikit-learn: Offre un'implementazione semplice di regressione e classificazione con GP, consentendo a principianti e professionisti di lavorarci.
GPyTorch: Una libreria per processi gaussiani costruita sopra PyTorch consente inferenza scalabile e supporta l'integrazione del deep kernel learning.
Stan: Un linguaggio di programmazione probabilistica che implementa la modellazione con GP tramite applicazioni di inferenza bayesiana.
Emukit: Un toolkit per l'ottimizzazione bayesiana e strumenti di modellazione probabilistica che aiutano a implementare i GP per esigenze decisionali.
Domande frequenti
A cosa servono i processi gaussiani?
I GP vengono utilizzati per regressione, classificazione e ottimizzazione bayesiana, fornendo previsioni probabilistiche con stime dell'incertezza. Sono utilizzati nel ML, nella geostatistica e nella previsione di serie temporali.
Come gestiscono l'incertezza i processi gaussiani?
I GP gestiscono l'incertezza definendo distribuzioni di probabilità su tutte le funzioni che corrispondono ai punti dati osservati. Ciò consente previsioni con medie calcolate e intervalli di confidenza quantificati.
Che cos'è un kernel nel contesto dei processi gaussiani?
I GP usano i kernel come funzioni di covarianza per identificare le somiglianze tra punti dati definendo le strutture di covarianza del processo. Il kernel scelto influenza la levigatezza del modello.
I processi gaussiani possono essere utilizzati per grandi dataset?
I GP tradizionali affrontano sfide computazionali con grandi dataset a causa della loro complessità temporale cubica, ma la scalabilità è migliorata con approssimazioni sparse come i GP sparsi.
Come si confrontano i processi gaussiani con le reti neurali?
I GP forniscono previsioni che includono misurazioni precise dell’incertezza. Le reti neurali forniscono risultati deterministici, ma necessitano di dataset estesi per eguagliare le prestazioni.
Risorse correlate
- Che cos’è il Processo Gaussiano?
- Come funziona
- Confronto con altri modelli di machine learning
- Vantaggi e sfide
- Casi d'uso
- Strumenti e librerie
- Domande frequenti
- Risorse correlate
Contenuto
Inizia gratis, scala facilmente
Prova il database vettoriale completamente gestito progettato per le tue applicazioni GenAI.
Prova Zilliz Cloud gratuitamente